Deep Learning to Clone Driving Behavior
20 Dec 2016
In this project we will Train a deep neural network to drive a car like us!
The goal is to drive a car autonomously in a simulator using a deep neural network trained on human driving behavior. Udacity has provided a simulator and a python script (drive.py) that connects our DNN with the simulator. The simulator has two modes. In the “training mode” on track-1 the car can be controlled through a keyboard to generate training data. Training data consists of images captured by three cameras mounted on the car and corresponding steering angle. A model is trained on the training data that can be used to predict steering angles while driving on unseen track-2 in simulator.
Problem Statement
I took upon myself to find a solution that will be extremely light weight. It should not require any powerful GPU machine or Amazon EC2 instance. It should run easily on my 2012 MBP with 8 GB memory. Yet it should be fast. Each epoch should not take more than 2mins. Also, for the design and model architecture, I refused to entertain any idea or concept that were not taught in the class. Although, I do assume that you have atleast taken “Intro to Machine Learning” class. It should be a required prerequisite IMHO.
Result
The following videos show the final model driving the car autonomously on two different tracks:
| Track 1 | Track 2 |
|---|---|
 |
 |
Model Fitting
Below is the console output from fitting the model:
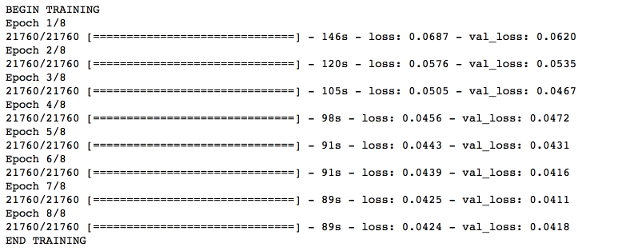
Conclusion
An important observation here is that the average time taken by each Epoch is only 1.7mins on a plain 2012 MBP. No fancy hardware. No intricate concepts at play here.
So we have achieved our goal of finding a DNN model that can be trained on vanilla hardware without compromising on the quality or training time. Hurray!